
Pele robótica de baixo custo imita tato humano com alta precisão
Pesquisadores das universidades de Cambridge e University College London (UCL) desenvolveram uma pele eletrônica inovadora, de baixo custo, resistente e altamente sensível, que pode ser acoplada a mãos robóticas como se fosse uma luva. Essa tecnologia permite que robôs percebam estímulos físicos do ambiente de forma mais parecida com a sensibilidade humana, melhorando significativamente a capacidade de interação com o mundo ao redor.
A pele artificial criada é composta por um material flexível e condutor, simples de fabricar e que pode ser moldado em diversas formas complexas, inclusive no formato de uma mão humana. Ao contrário de abordagens tradicionais que utilizam sensores distintos para cada tipo de estímulo – como pressão, temperatura ou dor – a solução apresentada pelos pesquisadores integra todas essas funcionalidades em um único material contínuo. Isso a torna mais próxima do funcionamento da pele humana, onde os sensores estão distribuídos por toda a superfície, e não concentrados em pontos específicos.
Mesmo que ainda não atinja a sofisticação da pele biológica, essa pele robótica é capaz de identificar sinais oriundos de mais de 860 mil microcanais internos, conseguindo distinguir entre diferentes formas de toque e pressão. Ela consegue, por exemplo, detectar um leve encostar de dedo, o contato com superfícies aquecidas ou resfriadas, danos provocados por cortes ou perfurações, além de toques simultâneos em múltiplos pontos. Tudo isso é possível graças à estrutura condutiva do material e ao uso de aprendizado de máquina, que ajuda a filtrar e interpretar os sinais mais relevantes para cada tipo de contato.
Em testes, os cientistas aplicaram diferentes estímulos físicos na pele artificial – desde calor intenso com sopradores térmicos até cortes com bisturi – e utilizaram os dados obtidos para treinar algoritmos de inteligência artificial. Esses algoritmos permitiram que o sistema “aprendesse” a reconhecer automaticamente os diferentes tipos de toque com base nos padrões de resposta elétrica do material. Assim, a pele robótica foi capaz de associar estímulos físicos específicos a interpretações táteis mais precisas, ampliando a capacidade sensorial dos robôs.
Esse avanço representa uma mudança importante na forma como sensores táteis são projetados para robótica. Em vez de múltiplos sensores individuais instalados em uma superfície flexível – abordagem que pode gerar interferência entre sinais e torna a fabricação mais trabalhosa – a nova pele utiliza um único tipo de sensor multifuncional, o que simplifica o processo produtivo e aumenta a robustez do sistema. Esse conceito, chamado de sensoriamento multimodal, é mais desafiador do ponto de vista da interpretação dos dados, mas oferece vantagens significativas em termos de durabilidade, praticidade e custo.
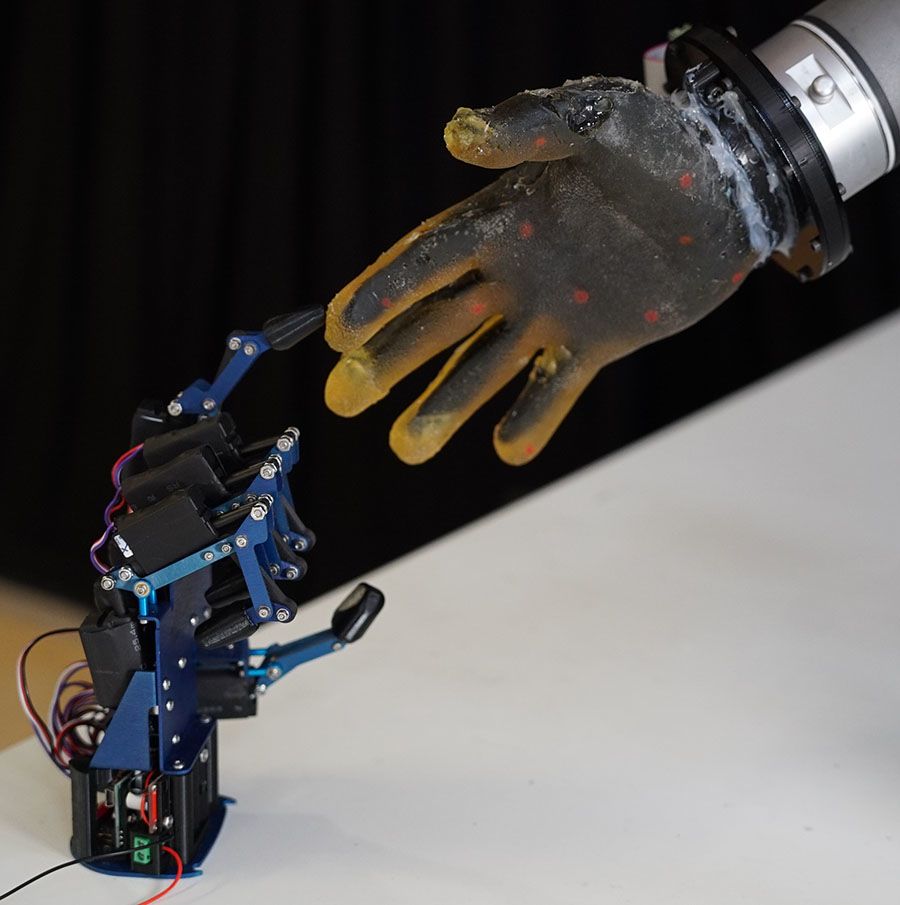
A equipe utilizou um hidrogel à base de gelatina, elástico e condutor de eletricidade, que foi derretido e moldado em forma de mão. Foram testadas várias configurações de eletrodos, e os pesquisadores concluíram que, com apenas 32 eletrodos localizados no pulso, era possível coletar mais de 1,7 milhão de dados de toda a mão. Isso se deve à complexa rede de canais condutores que percorre o material, funcionando como uma malha sensorial em escala microscópica.
Segundo os autores, essa tecnologia tem potencial não só para aplicações em robótica humanoide ou próteses com sensibilidade tátil, mas também em outras áreas que exigem interação física precisa, como indústria automotiva, cirurgias assistidas por robôs ou missões de resgate em ambientes hostis. A grande vantagem da abordagem está na facilidade de produção e na adaptabilidade do material, que pode ser calibrado com toques reais para diferentes finalidades.
O estudo foi financiado pelo programa Global Research Outreach da Samsung, pela Royal Society e pelo Conselho de Pesquisa em Engenharia e Ciências Físicas do Reino Unido (EPSRC), que integra a UK Research and Innovation (UKRI). O professor Fumiya Iida, um dos autores do trabalho, é membro do Corpus Christi College, da Universidade de Cambridge. Os resultados completos da pesquisa foram publicados na revista Science Robotics, no artigo intitulado: “Multimodal information structuring using single layer soft sensory skins and high-density electrical impedance tomography” (DOI: 10.1126/scirobotics.adq2303).